無人航空機(ドローン)は、現在農業分野等において広く利用され、今後は災害時の物資運搬や遭難者捜索等への活用が期待されている技術です。無人航空機の利活用分野が広がる中、これを安全に利用するためには、他の無人航空機との衝突を回避するための技術開発を進めることが喫緊の課題です。
こうした中で、今般、経済産業省及びNEDOが研究開発・標準化支援を行った、無人航空機衝突回避システムに関する国際規格(ISO15964)が発行されました。これにより、無人航空機の衝突回避技術の開発の方向性を統一することが可能になるとともに、無人航空機の社会実装に向けた各国の取組が加速し、幅広いサービスの実現につながることが期待されます。
1.背景
一般にドローンと呼ばれる小型から中型の無人航空機は、現在、農業分野等で利用が広がっており、今後は災害時の物資運搬や遭難者捜索、物流インフラ等の用途での活用が期待されています。一方で、ドクターヘリなどの有人航空機と無人航空機とのニアミス実例
※1
が国内で報告される等、他の航空機との衝突をどのように回避するかが、無人航空機を安全に利用する上で喫緊の課題となっています。
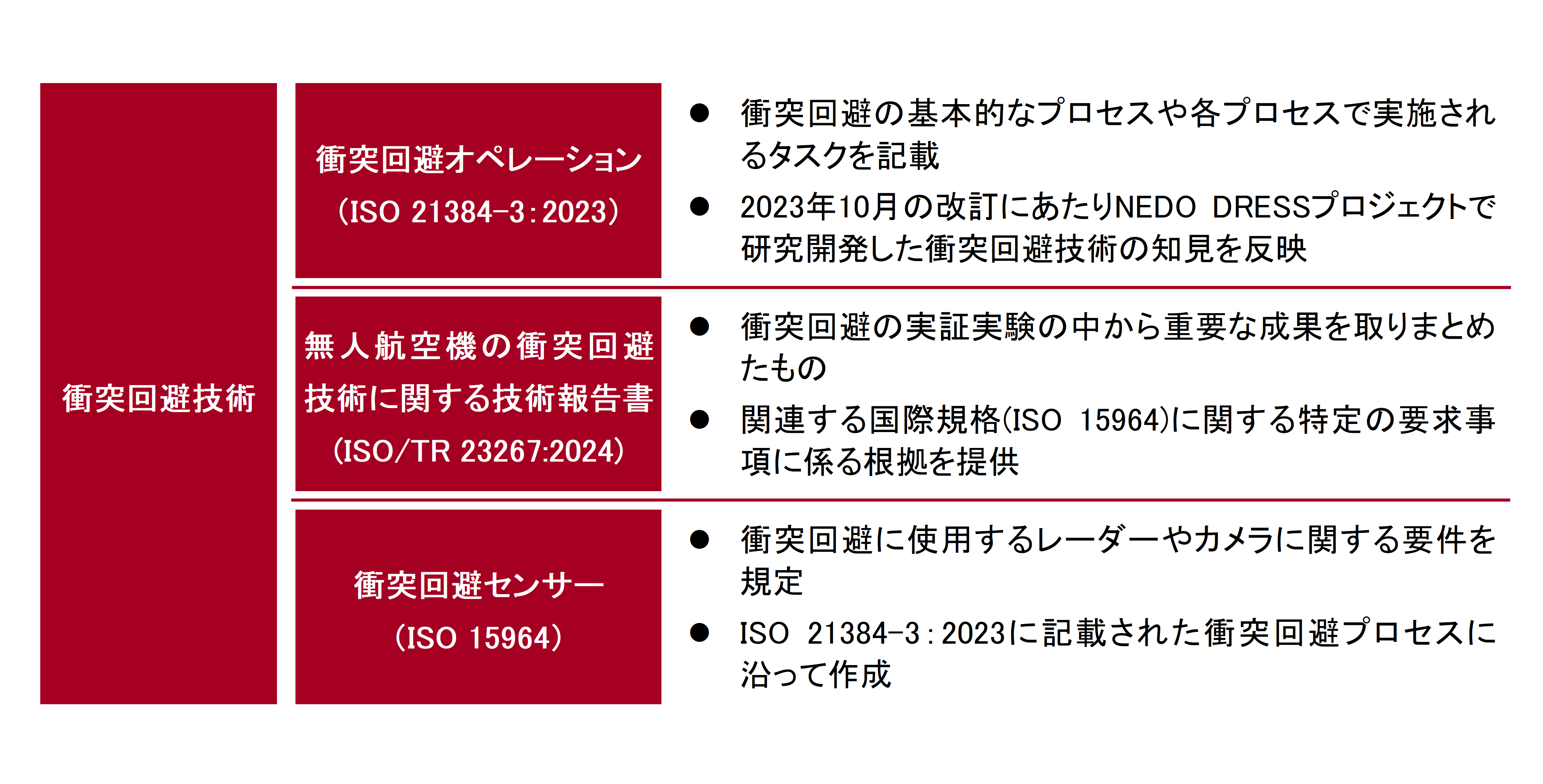
こうした中、経済産業省は、国内外での幅広いドローンの利活用の実現に向け、無人航空機の衝突回避に関する国際標準提案の支援に取り組んできました。2017年に支援を開始した、無人航空機の衝突回避技術に係る研究開発・実証実験成果を基礎として(図1参照)、2023年10月には、無人航空機の運航手順の規格(ISO 21384-3:2023
※2
)が日本主導で改正されたほか、2024年4月には、無人航空機の衝突回避に関する技術報告書(ISO/TR 23267
※3
)が日本主導で提案、公開されました。
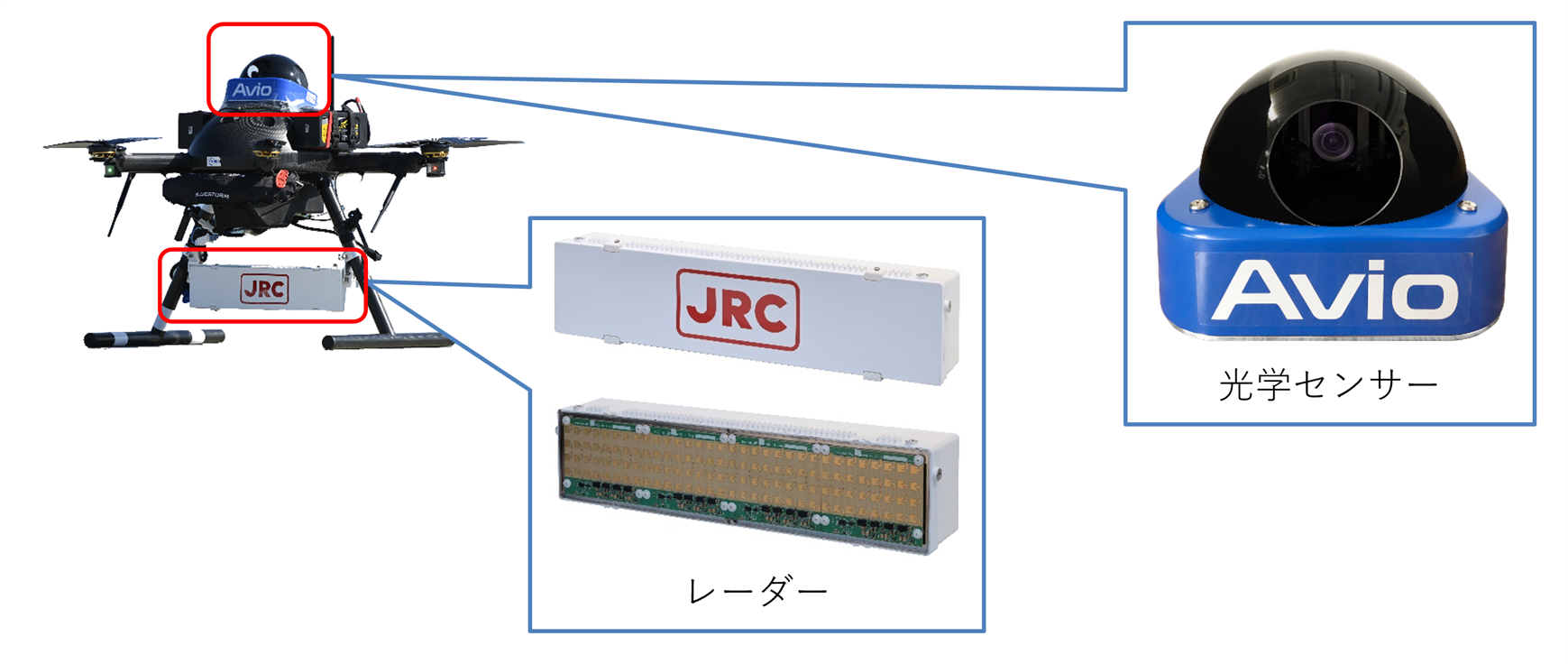
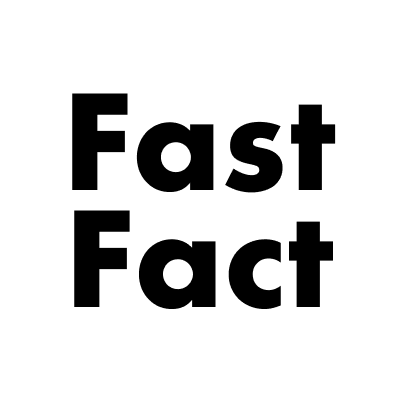
図1 NEDO DRESSプロジェクトで開発したセンサーの例
2.規格の概要
今般発行されたISO 15964 ※4 は、経済産業省及びNEDOにおいて研究開発・標準化支援を実施したもので、2023年のISO 21384-3:2023(無人航空機の運航手順の規格)改正時に新たに規定された、無人航空機の基本的な衝突回避手順の6ステップ(「対象物の探知」、「ターゲットの認識」、「回避機動」、「回避結果の確認」、「元ルートへの復帰」及び「元ルートでの飛行」)を具現化する、衝突回避システムの基本アーキテクチャを規定しています(表1及び図2参照)。
今回のISO 15964では、無人航空機に搭載される、レーダーと光学センサーを備えた衝突回避システムについて、各種センサー機器の役割や探知・認識距離などの要求事項等を、各ステップに沿って規定しています。なお、これらの要求事項の規定の際には、NEDOの「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」(「NEDO DRESSプロジェクト」) ※5 における実証実験の成果や、2024年に公開されたISO/TR23267を根拠としています。
表1 衝突回避6ステップで使用されるハードウエア・ソフトウエア
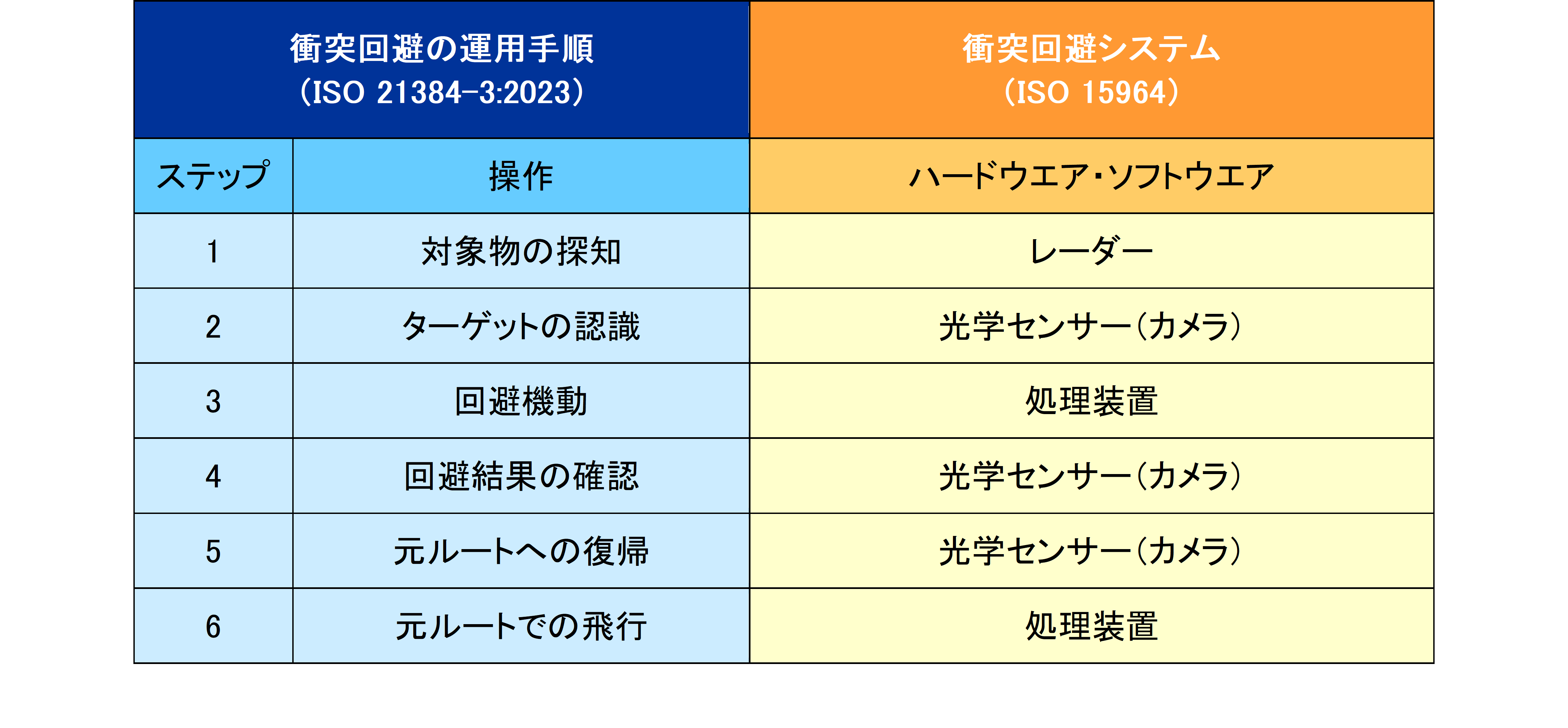
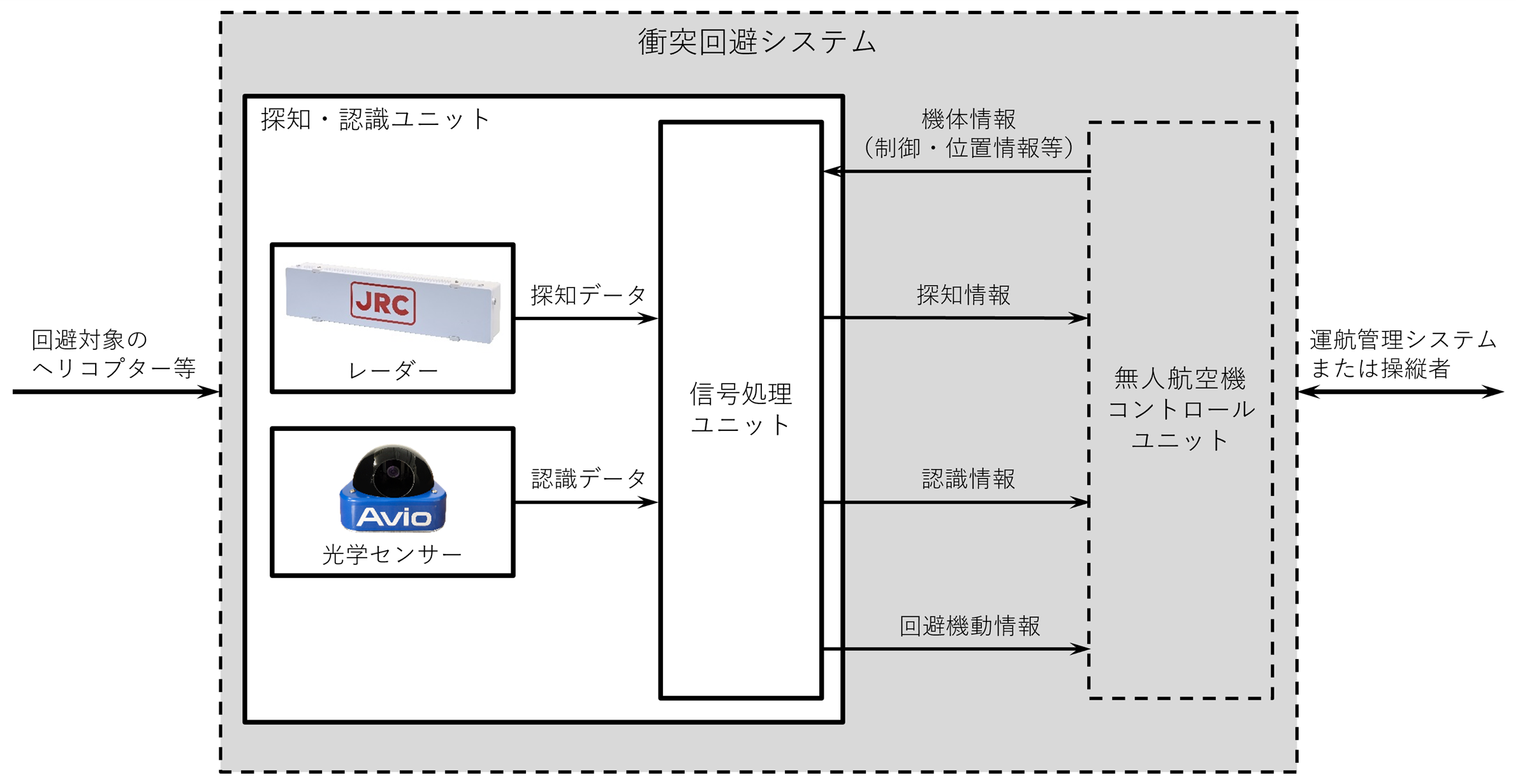
図2 衝突回避システムの基本アーキテクチャ(中長距離の場合)
表2 NEDO DRESSプロジェクトの成果のISO規格への反映
※6
3.期待される効果
本規格により、無人航空機の衝突回避技術の開発の方向性を統一することが可能になるとともに、無人航空機の社会実装に向けた各国の取組が加速し、幅広いサービスの実現につながること等が期待されます。
「航空機と無人航空機、無人航空機同士の衝突回避策等について(国土交通省航空局、2016年11月8日)」
※2 ISO 21384-3:2023
無人航空機システム第3部運航手順
※3 ISO/TR 23267
無人航空機向け衝突回避システムの試験方法の実証結果
※4 ISO 15964
無人航空機用衝突回避システム
※5 ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト(「NEDO DRESSプロジェクト」)
NEDOが2017年より推進する、【1】ロボット・ドローン機体の性能評価基準等の開発、【2】無人航空機の運航管理システム及び衝突回避技術の開発、【3】ロボット・ドローンに関する国際標準化の推進、【4】空飛ぶクルマの先導調査研究の4項目により、省エネルギー社会の実現を目指したプロジェクト。
※6 「NEDO DRESSプロジェクト」の成果のISO規格への反映
2023年度成果報告書 情報収集費/NEDOにおける標準の戦略的活用に資する事例等調査をもとに日本無線が作成。
成果報告書
関連リンク
担当
-
国際標準について
イノベーション・環境局 国際標準課長 西川
担当者:湯川、本田、赤道
電話:03-3501-1511(内線 3423)
bzl-s-kijun-ISO★meti.go.jp
※[★]を[@]に置き換えてください。 -
ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクトについて
製造産業局 航空機武器産業課 次世代空モビリティ政策室長 滝澤
担当者:櫻井、山本
電話:03-3501-1511(内線 3621)
bzl-s-seizo-soramobi★meti.go.jp
※[★]を[@]に置き換えてください。